










































方案简介
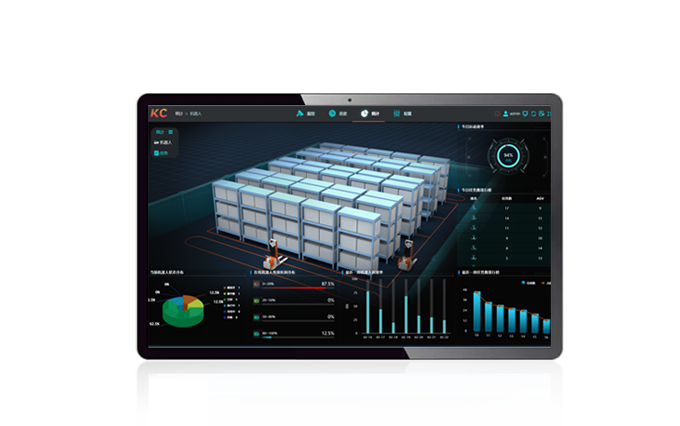
潜伏顶升式移动机器人通过顶升方式搬运托盘、货架等载具,将运输的物料、货架举升并快速平稳运送至指定位置,完成仓储厂房车间的货架调配、分拣、整合等工作,自动对接移栽机构、升降机构、立库等设备,达到无人化。
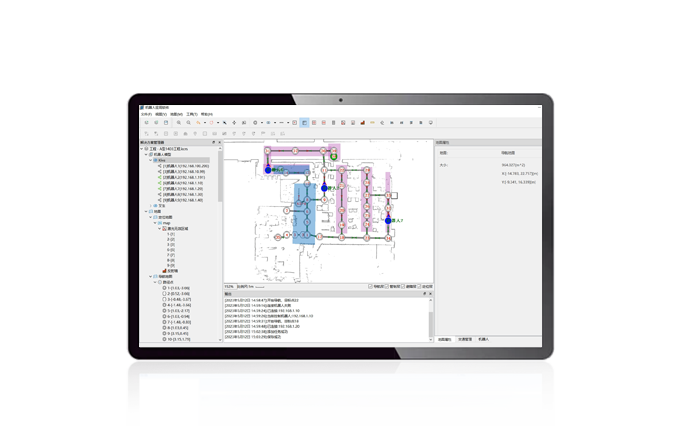
潜伏顶升搬运式整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
潜伏顶升搬运式整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
方案构成


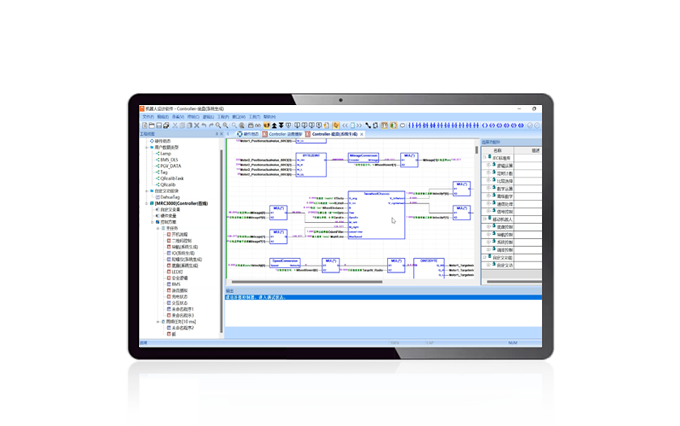
通用移动机器人控制器

差速移动机器人控制器

二维码导航专用控制器


激光传感器

激光传感器

激光传感器

二维码相机


差速轮

驱动器

驱动器
驱动器


电机

电机

驱动器

驱动器
驱动器

复用导航激光


有线手操器

呼叫器模块

车载显示屏

开关

灯光


无线客户端


电池

电池


二维码相机

视觉避障模块

双目摄像头
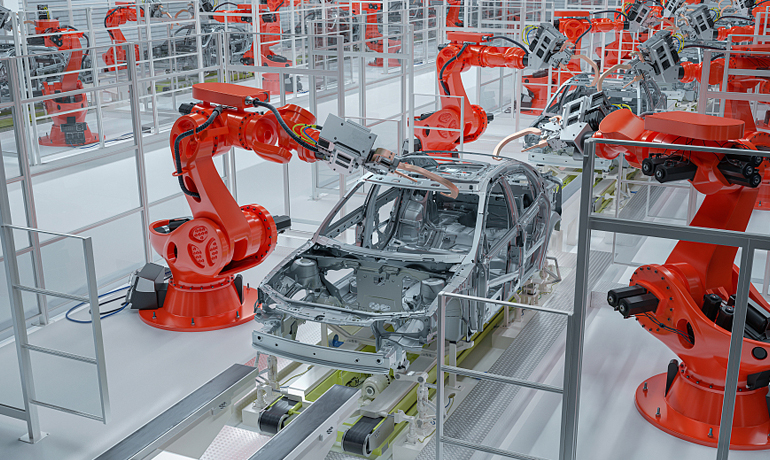
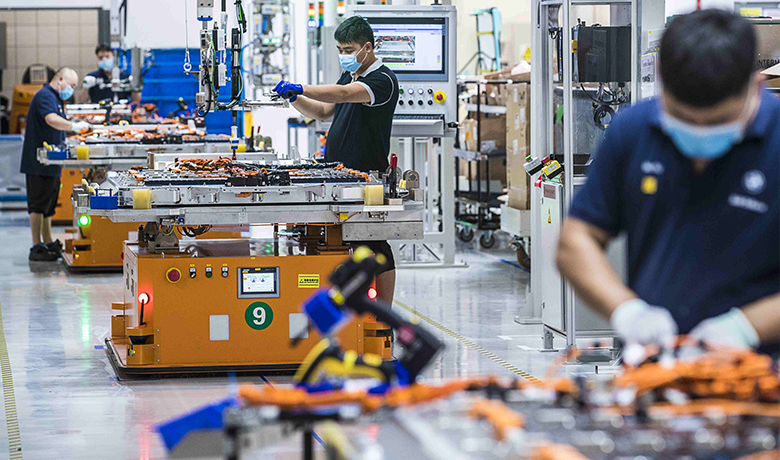
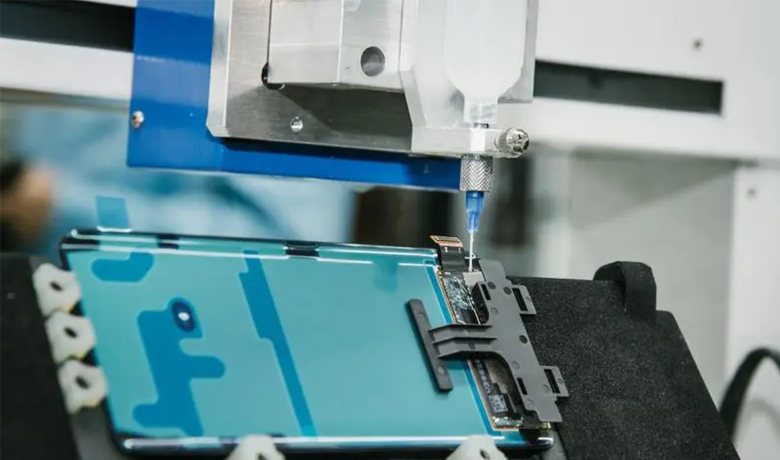
相关案例
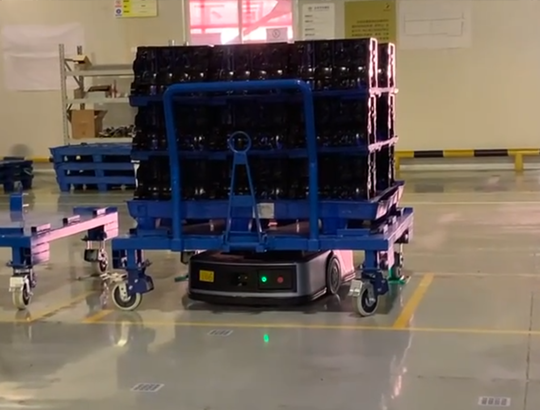
潜伏顶升移动机器人
导航方式:激光导航
底盘方式:两驱差速
导航精度: ±10mm
底盘方式:两驱差速
导航精度: ±10mm

© 2023 浙江美高梅控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备19001570号-1 xivmodels.com
技术支持:宗阖网络